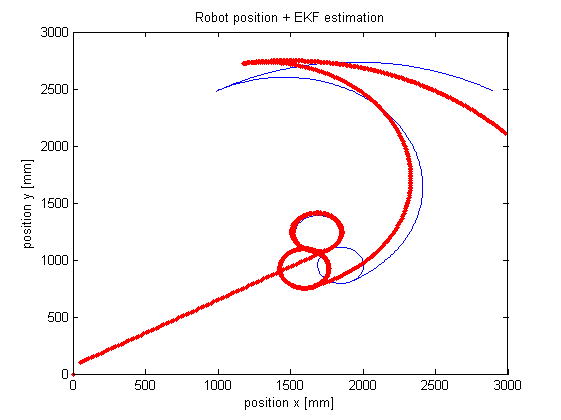
Implementacja EKF na robocie
W dzisiejszym wpisie przedstawię implementację Rozszerzonego Filtru Kalmana dla robota Micromouse. Aby dojść do tego momentu musiałem najpierw wyznaczyć model ruchu robota oraz sprawdzić działanie EKF w środowisku symulacyjnym. Można o tym poczytać we wcześniejszych wpisach.